图像预处理-插值方法
最后更新时间:
文章总字数:
预计阅读时间:
一.插值方法
当我们对图像进行缩放或旋转等操作时,需要在新的像素位置上计算出对应的像素值。
而插值算法的作用就是根据已知的像素值来推测未知位置的像素值。
1.1 最近邻插值
CV2.INTER_NEAREST
其为 warpAffine() 函数的参数 flags 的其一,表示最近邻插值。
这个方法是根据原图与目标图的坐标关系来做填充,目标图中一点的坐标经过公式找到原图坐标然后找到像素点,然后填充进目标图中,也就是填充最近的像素。下面是公式:
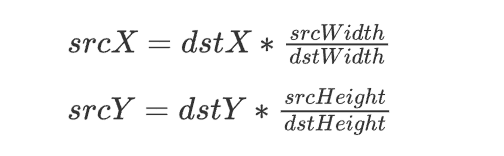
dstX:目标图像中某点的x坐标,
dstY:目标图像中某点的y坐标,
srcWidth:原图的宽度,
dstWidth:目标图像的宽度;
srcHeight:原图的高度,
dstHeight:目标图像的高度。
而srcX和srcY:目标图像中的某点对应的原图中的点的x和y的坐标。
如果计算出的是小数,则向下取整(防止取不到点)。
1.2 双线性插值
CV2.INTER_LINEAR
原始图像的某些像素坐标可能不再是新图像中的整数位置,这时就需要使用其他插值算法来确定这些非整数坐标的像素值。我们依然需要把目标图像的点映射到原图像上,公式不变。默认的插值方法就是双线性插值。
先来看看单线性插值:
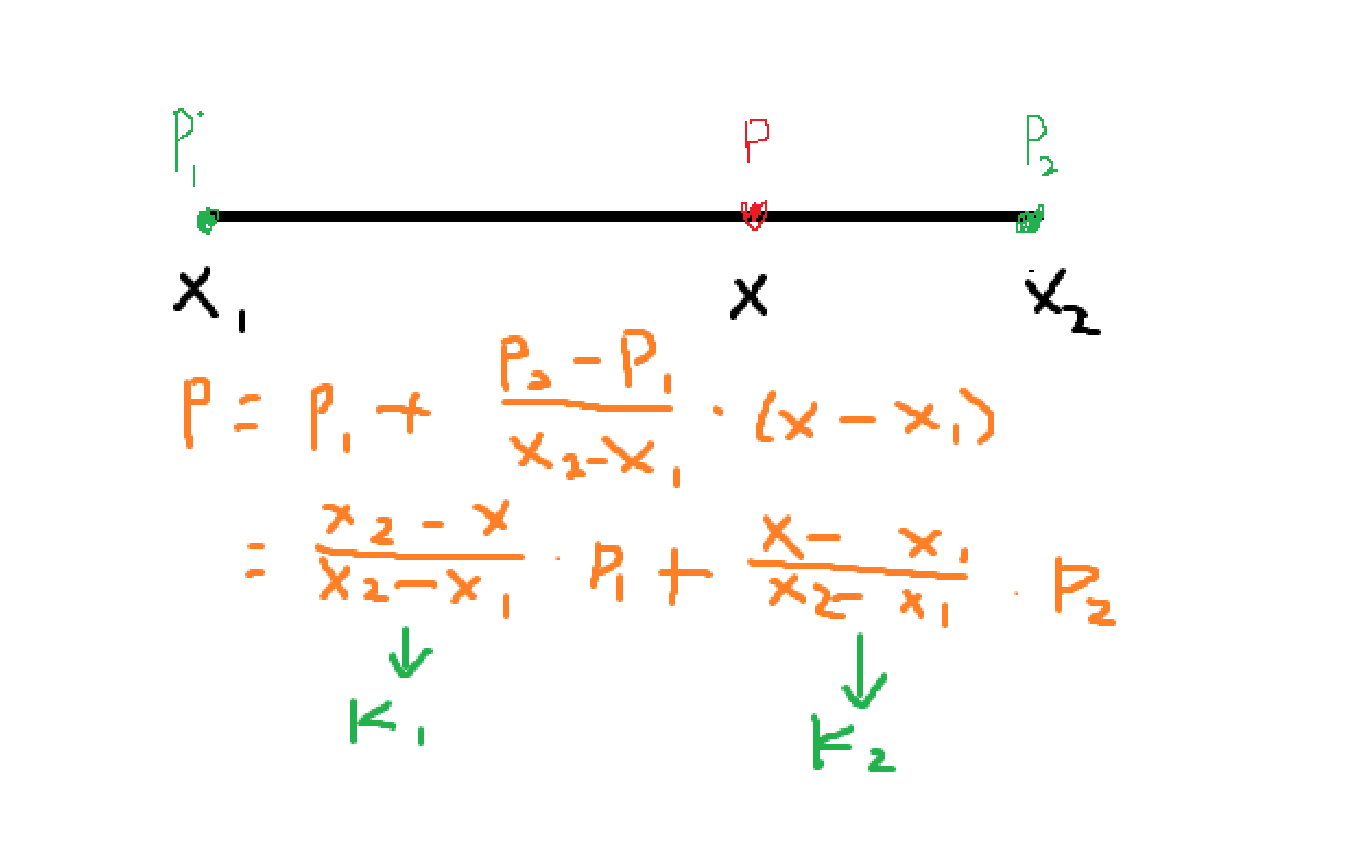
可见,单位像素值就是 (P2-P1)/(x2-x1) ,其中通过两点与目标点的关系给出表达式,简化后得到单线性插值的像素值公式。我们也容易理解,k2 的值是更大的,说明 P2 与 P 关系更近。
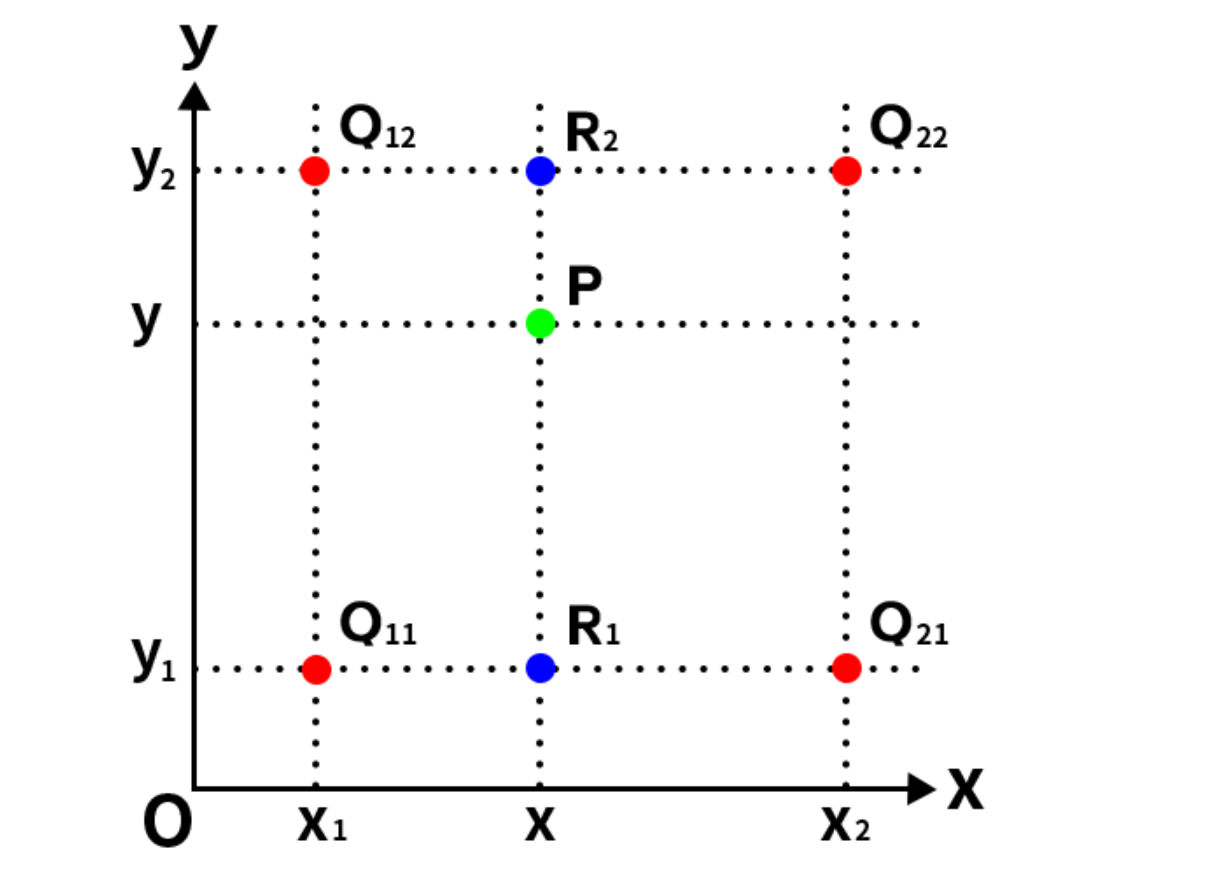
而双线性插值就是做两次,分别在水平方向和垂直方向上做线性插值:
水平方向:根据 x 与 x0 和 x1 的关系计算出 P00 和 P10 、 P01 和 P11 之间的插值结果。
垂直方向:将第一步的结果与 y 与 y0 和 y1 的关系结合,再在垂直方向上做一次线性插值。
1.3 像素区域插值
cv2.INTER_AREA
使用像素区域插值方法进行缩小图像时,它就会变成一个均值滤波器(就是一个卷积核),其工作原理可以理解为对一个区域内的像素值取平均值。目标图像的每个像素点,其值等于卷积核中所有像素值的均值。(依然需要目标图像与原图像的坐标对应公式。)
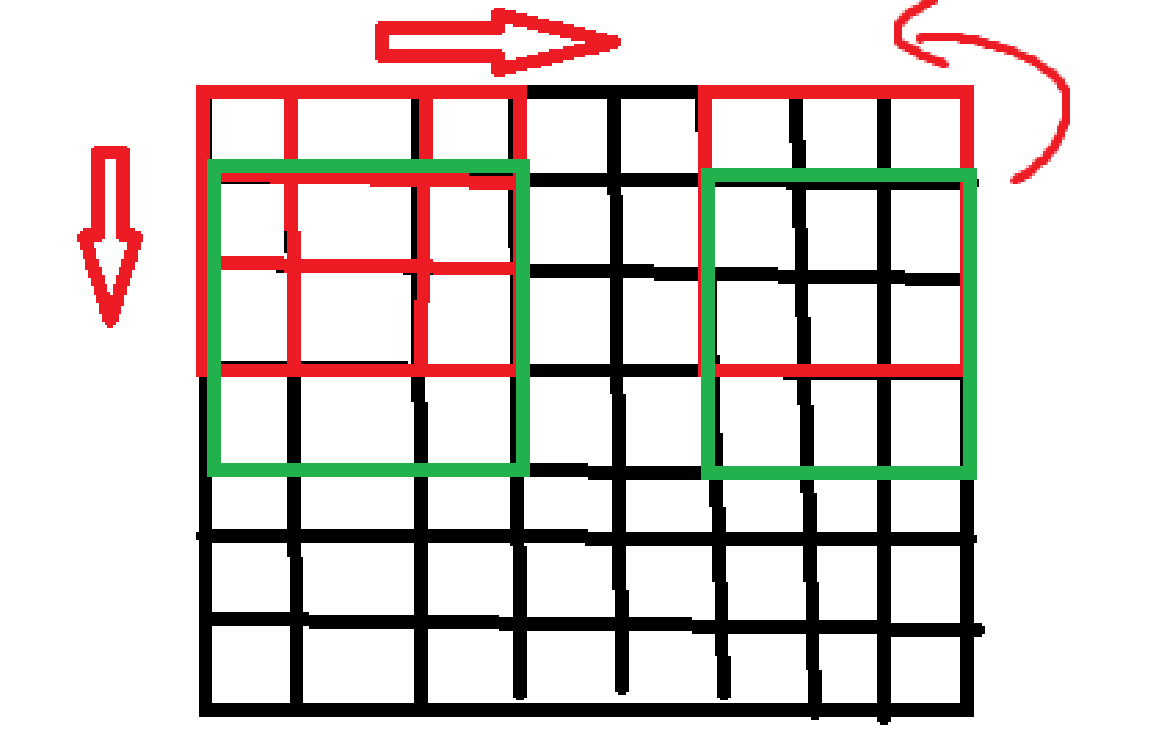
卷积核先往右边走,计算完一个值就移动一格,到边缘就换到下一行开始依次进行。
1.4 双三次插值
cv2.INTER_CUBIC
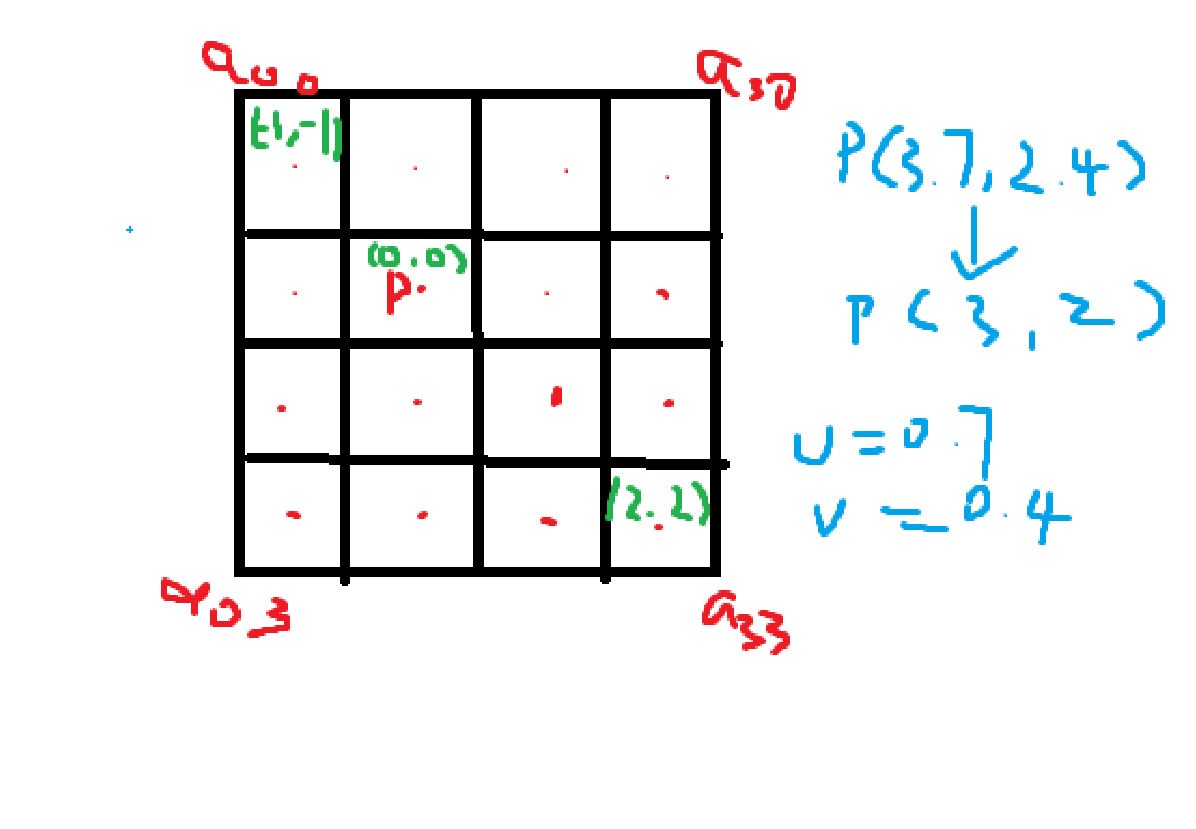
双三次插值法需要原图像中近邻的16个点来加权,也就是4x4的网格。
还是需要公式得出一点在原图像中的坐标,找到离它最近的16个像素点。此时坐标有小数,则把整数部分与小数部分分离为(x+u,y+v)。取整数部分(x,y),这个时候就肯定会是16个像素点的其中之一,将其作为坐标原点(是的你没有听错),然后再分别计算其他15个像素点的坐标。
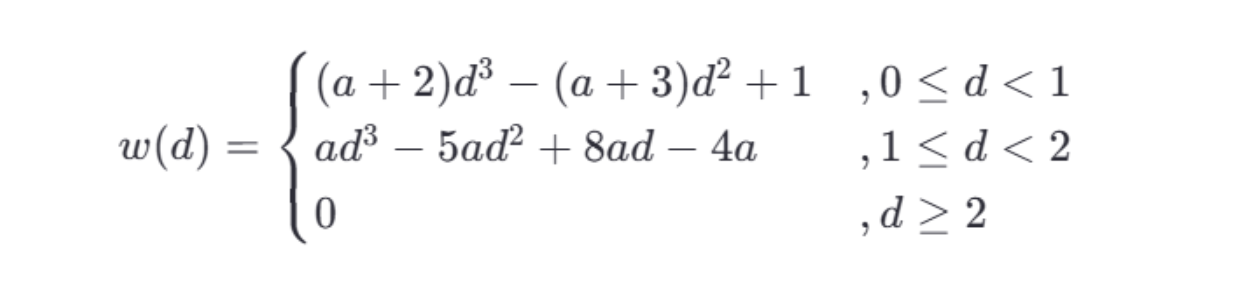
再来到重点,把这15个像素点的横纵坐标都取出来,然后分别与取出来的小数部分u或v做差,再取绝对值,这就是每个像素点在一个方向上与原点的距离dw或dh。随后再根据公式计算得出权重,再把像素值乘以对应权重,最后把所有乘积相加,就是插值后的像素值。
公式:
1.5 Lanczos插值
与双三次插值的思想是一样的,不同的就是其需要的原图像周围的像素点的范围变成了8*8,并且不再使用BiCubic函数来计算权重,而是换了一个公式计算权重。

其中a通常取2或者3,当a=2时,该算法适用于图像缩小。a=3时,该算法适用于图像放大。