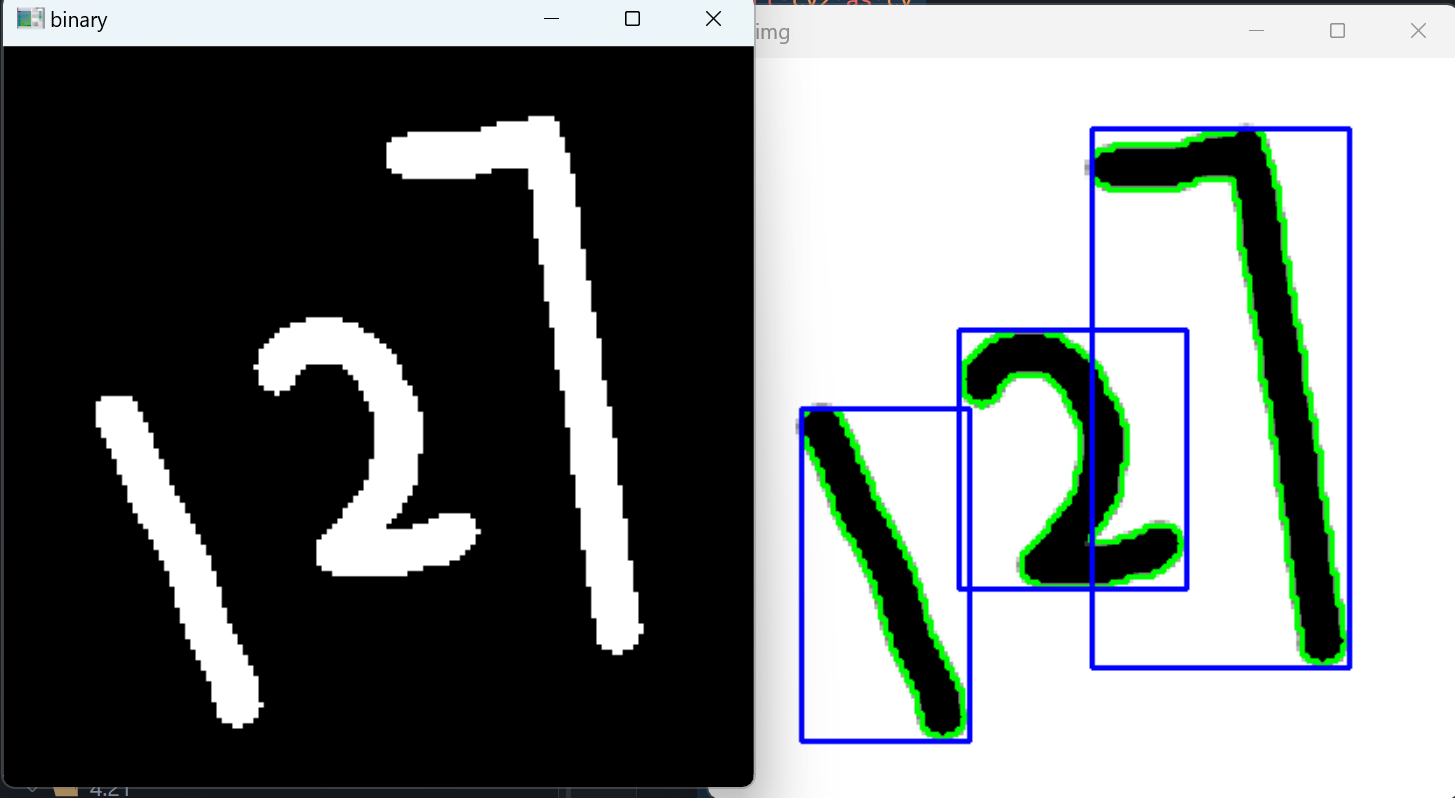
其实就是外接轮廓,有了轮廓点就可以找到最上、最下、最左、最右的四个坐标(因为有xmin,xmax,ymin,ymax)。就可以绘制出矩形。
一.外接矩形
cv.boundingRect(轮廓点)
- 返回x,y,w,h,传入一个轮廓的轮廓点,若有多个轮廓需要循环获取。
这是最简单的外接矩形,理论上是方方正正的。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
| import cv2 as cv
num = cv.imread('../images/num.png')
img = num.copy()
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_OTSU+cv.THRESH_BINARY_INV)
contours, hierarchy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
cv.drawContours(img, contours, -1, (0, 255, 0), 2)
for cnt in contours:
x, y, w, h = cv.boundingRect(cnt)
cv.rectangle(img, (x, y), (x+w, y+h), (255, 0, 0), 2)
cv.imshow('img', img)
cv.imshow('binary', binary)
cv.waitKey(0)
cv.destroyAllWindows()
|
结果:
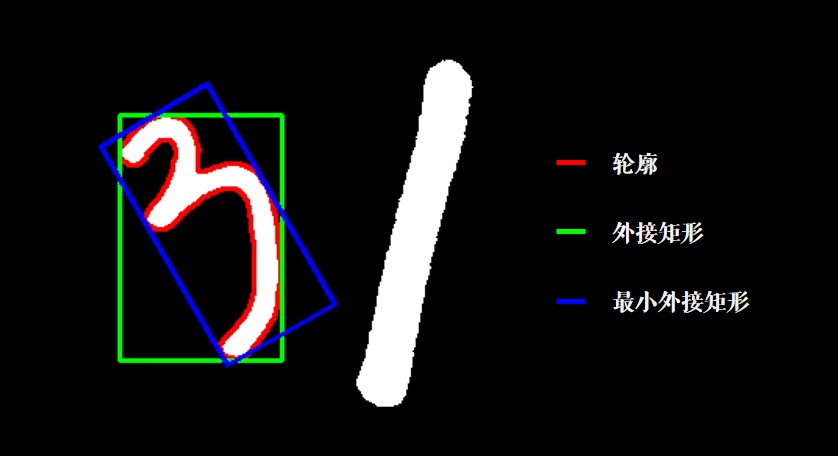
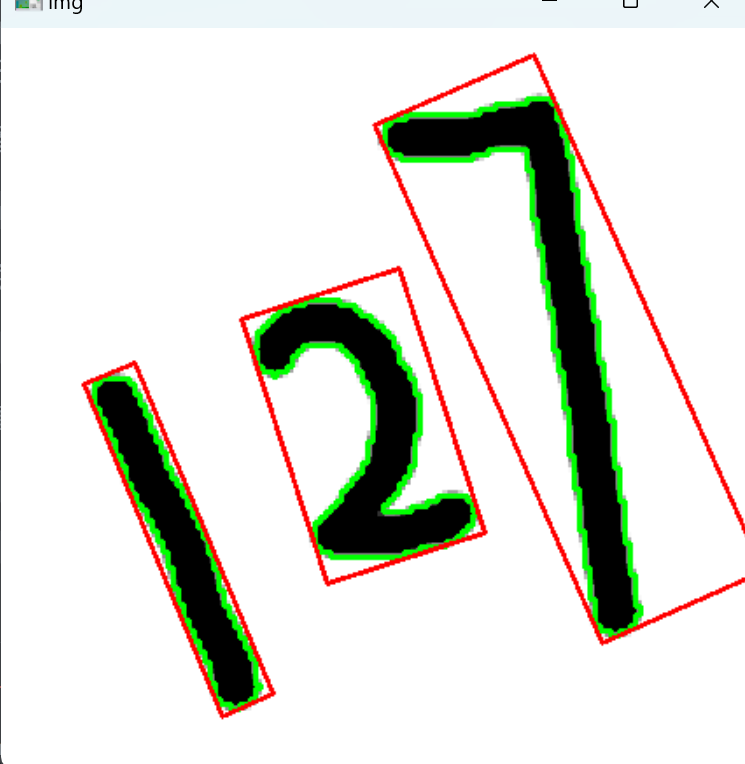
二.最小外接矩形
寻找最小外接矩形使用的算法叫做旋转卡壳法,其就是基于凸包点进行的。
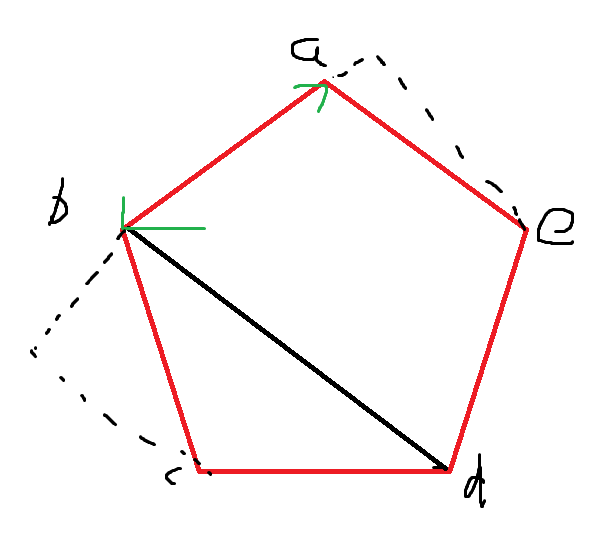
而对于凸包多边形的一个最小外接矩形,应存在一条边与原凸包多边形的边共线。
如图,这是一个凸包点的图像,找一条边ab,然后找到离这条边最远的点d,画一条线。然后分别找在向量ab与ba上投影最长的点,找到后平移之前画的直线与投影最长的点重合即可。
rect = cv2.minAreaRect(cnt)
传入的cnt参数为contours中的轮廓也可以是凸包点(不过内部已经自动处理得到凸包了)
cv2.boxPoints(rect).astype(int)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
| import cv2 as cv
num = cv.imread('../images/num.png')
img = num.copy()
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_OTSU+cv.THRESH_BINARY_INV)
contours, hierarchy = cv.findContours(binary, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
cv.drawContours(img, contours, -1, (0, 255, 0), 2)
for cnt in contours:
rect = cv.minAreaRect(cnt)
box = cv.boxPoints(rect).astype(int)
cv.drawContours(img, [box], 0, (0, 0, 255), 2)
cv.imshow('img', img)
cv.waitKey(0)
cv.destroyAllWindows()
|
结果:
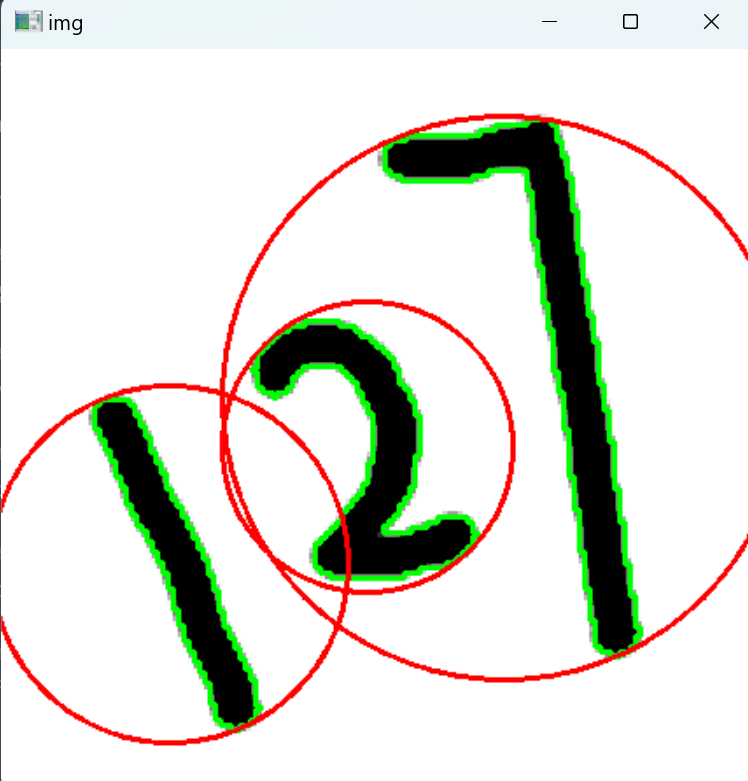
三.最小外接圆
使用的算法是Welzl算法。Welzl算法基于一个定理:希尔伯特圆定理,对于平面上的任意三个不在同一直线上的点,存在一个唯一的圆同时通过这三个点,且该圆是最小面积的圆。
若已经存在平面上互不共线(或共圆)的 n 个点,并确定了它们的最小覆盖圆,那么添加第 n+1 个点,并且要求这个点不在原来的最小覆盖圆内(即在圆外),为了使新的包含 n+1 个点的最小覆盖圆的半径增大,新加入的点必须位于由原 n 个点确定的最小覆盖圆的边界上(即圆周上)。
这是因为,如果新点在原最小覆盖圆的内部,显然不会影响最小覆盖圆;如果新点在原最小覆盖圆之外但不在圆周上,那么通过新点和至少两个原有圆上的点可以构造出一个更大的圆,这个圆必然比原最小覆盖圆更大,因此不是包含所有 n+1 个点的最小覆盖圆。所以,按照这一逻辑,当第 n+1 个点在原 n 个点的最小覆盖圆外时,确实这个点会位于包含所有 n+1 个点的新最小覆盖圆的圆周上。
获取参数的函数:
cv2.minEnclosingCircle(points)
参数说明:
返回值:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
| import cv2 as cv
num = cv.imread('../images/num.png')
img = num.copy()
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_OTSU+cv.THRESH_BINARY_INV)
contours, hierarchy = cv.findContours(binary, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
cv.drawContours(img, contours, -1, (0, 255, 0), 2)
for cnt in contours:
(x, y), radius = cv.minEnclosingCircle(cnt)
center = (int(x), int(y))
radius = int(radius)
cv.circle(img, center, radius, (0, 0, 255), 2)
cv.imshow('img', img)
cv.waitKey(0)
cv.destroyAllWindows()
|
结果: