图像预处理-图像边缘检测
最后更新时间:
文章总字数:
预计阅读时间:
一.高斯滤波
因为图像边缘检测就是把像素值有差异的地方提取出来,所以噪声会有很大影响,因此需要对图像进行平滑处理,高斯滤波是流程中常用的方法。
二.计算图像的梯度与方向
过程中通常使用sobel算子进行梯度计算,在OpenCV中,默认使用 G=|G(x)+G(y)| 来计算梯度值。
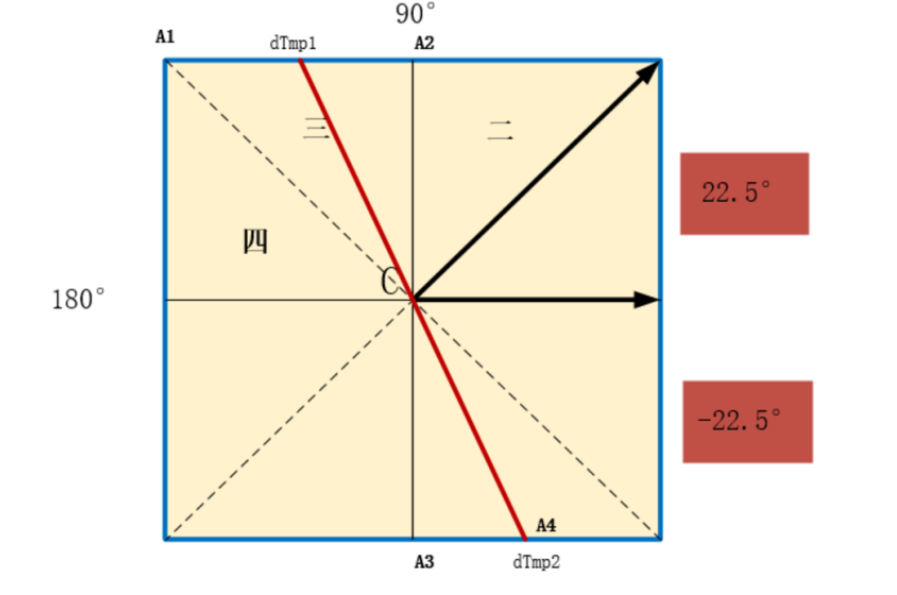
这个角度值其实是当前边缘的梯度方向,若梯度方向不是0°、45°、90°、135°这种特定角度,那么就要用到插值算法来计算当前像素点在其方向上进行插值的结果,然后进行比较并判断是否保留该像素点。
为-22.5°
22.5°,或-157.5°157.5°,则认为边缘为水平边缘;为22.5°
67.5°,或-112.5°-157.5°,则认为边缘为45°边缘;为67.5°
112.5°,或-67.5°-112.5°,则认为边缘为垂直边缘;为112.5°
157.5°,或-22.5°-67.5°,则认为边缘为135°边缘;
三.非极大值抑制
经过第二步得到的边缘不经过处理是没办法使用的,因为高斯滤波去噪后边缘会模糊,得到的边缘像素点非常多,因此需要对其进行一些过滤操作,而非极大值抑制就是一个很好的方法。即检查每个像素点的梯度方向上的相邻像素,并保留梯度值最大的像素,将其他像素抑制为零。
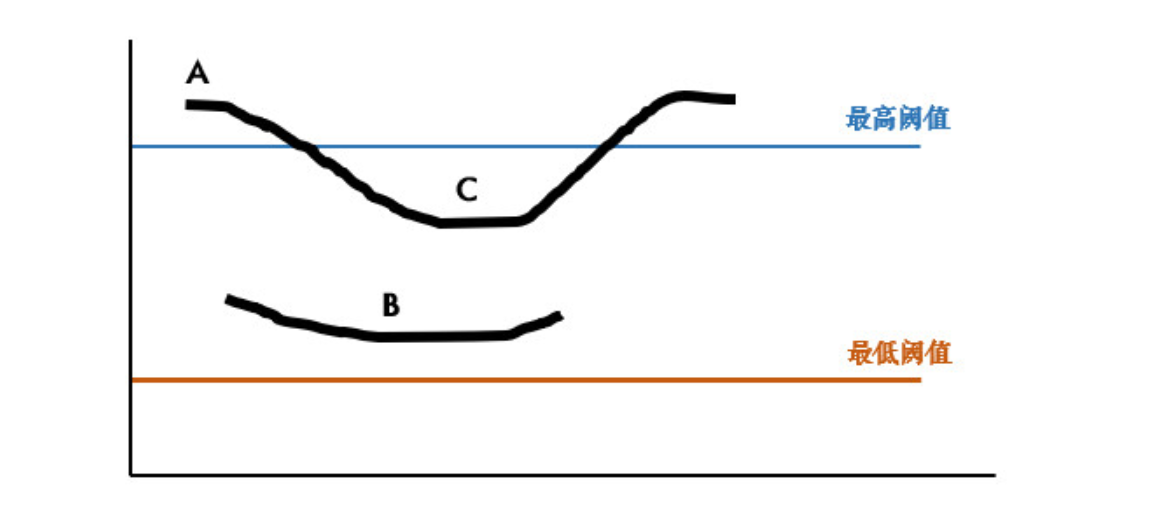
四.双阈值筛选
经过非极大值抑制之后,我们还需要设置阈值来进行筛选。
当某一像素位置的幅值超过最高阈值时,该像素必是边缘像素;当幅值低于最低阈值时,该像素必不是边缘像素;幅值处于最高像素与最低像素之间时,如果它能连接到一个高于阈值的边缘时,则被认为是边缘像素,否则就不会被认为是边缘。
五.实现边缘检测的流程函数
edges = cv2.Canny(image, threshold1, threshold2)
threshold1:低阈值,用于决定可能的边缘点。
threshold2:高阈值,用于决定强边缘点。
即使读到的是彩色图也可以进行处理。
1 | |
可以发现,提前手动进行去噪处理效果更好,虽然canny函数内置了高斯滤波,但根据要求进行去噪预处理可以得到更好的效果。